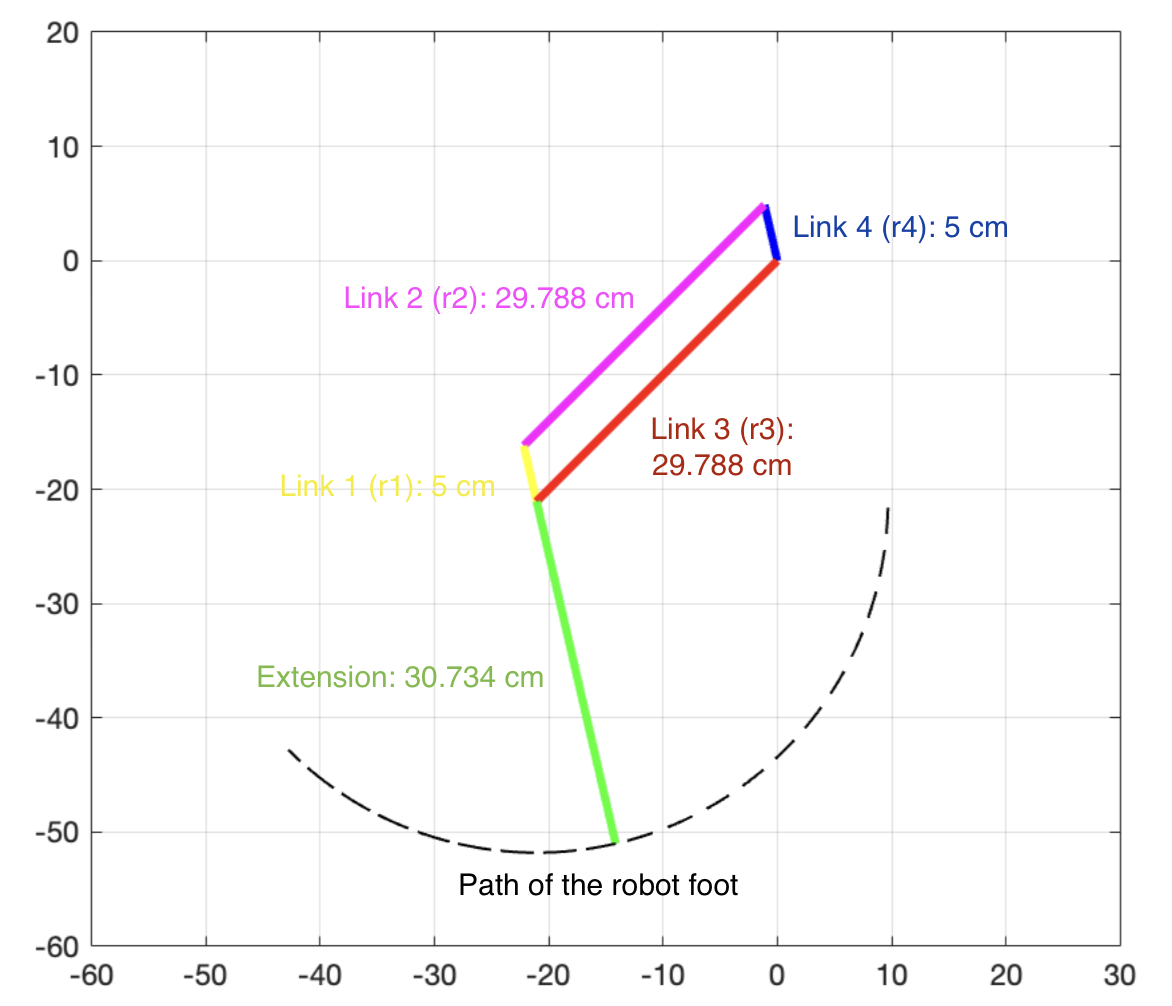
Robot leg diagram with movement path
Location: University of Toronto
(Sep 2024 - Dec 2024)
Design of a Walking Robot for Monitoring and Maintenance Project
Description:
In this project, I was responsible for calculations and analysis of a walking robot. In the gear analysis section, I calculated torque and gear ratio to select an optimal motor for a 37.5 kg robot moving at a speed of 1.2 m/s. I also developed MATLAB code for the path analysis and the final model, which was used to calculate the robot’s link length and simulate its motion. This MATLAB code was important in visualizing the final mechanism and validating the design’s path. Through this project, I enhanced my ability to solve complex mechanical problems using MATLAB, and gained practical skills that will be applicable to future engineering design and analysis tasks.