Differential Gear Box
Description:
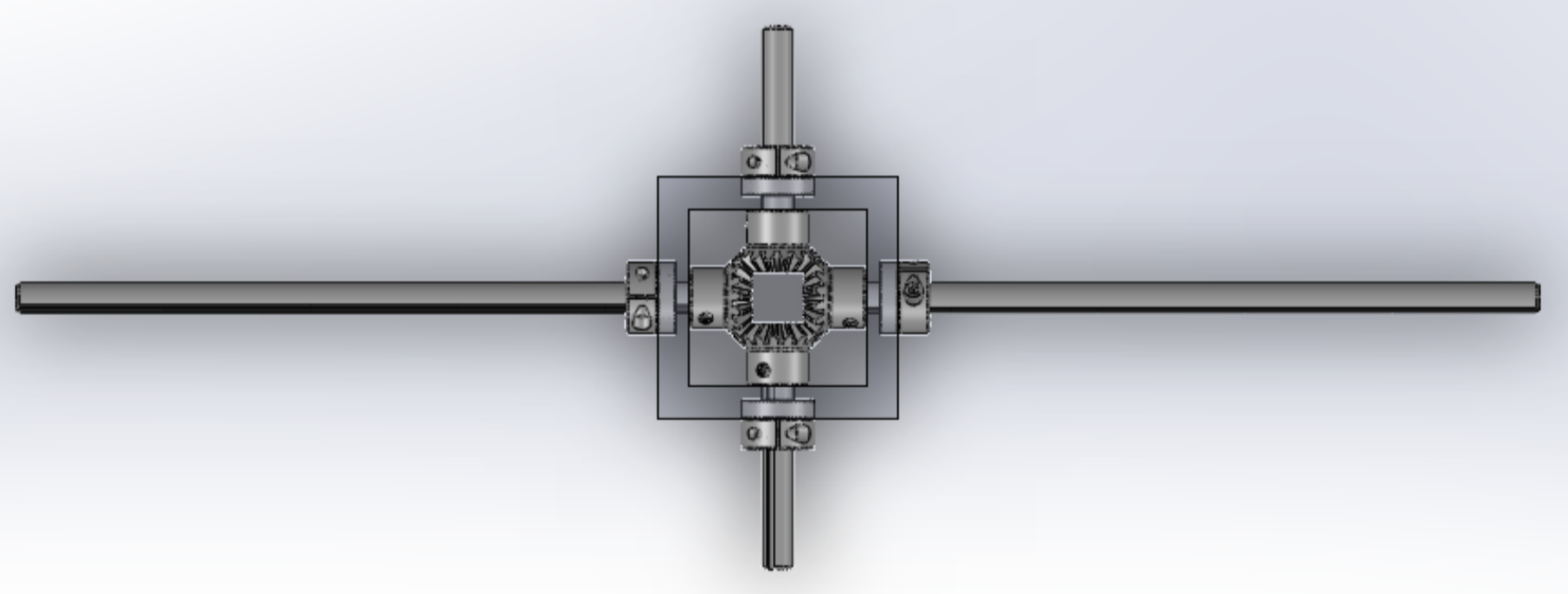
This is a design of a differential gearbox that is capable of leveling the chassis as the rover traverses uneven terrain. The differential gearbox is made out of aluminum, and the shafts are made out of steel. Four bevel gears, made out of steel, are also used in the process of design. The gearbox will be mounted below the chassis to lower the center of gravity.
Location: ROBOTICS FOR SPACE EXPLORATION, University of Toronto
(Sep 2021 - May 2023)